
Driving System
Automatically Drive Your Vehicle
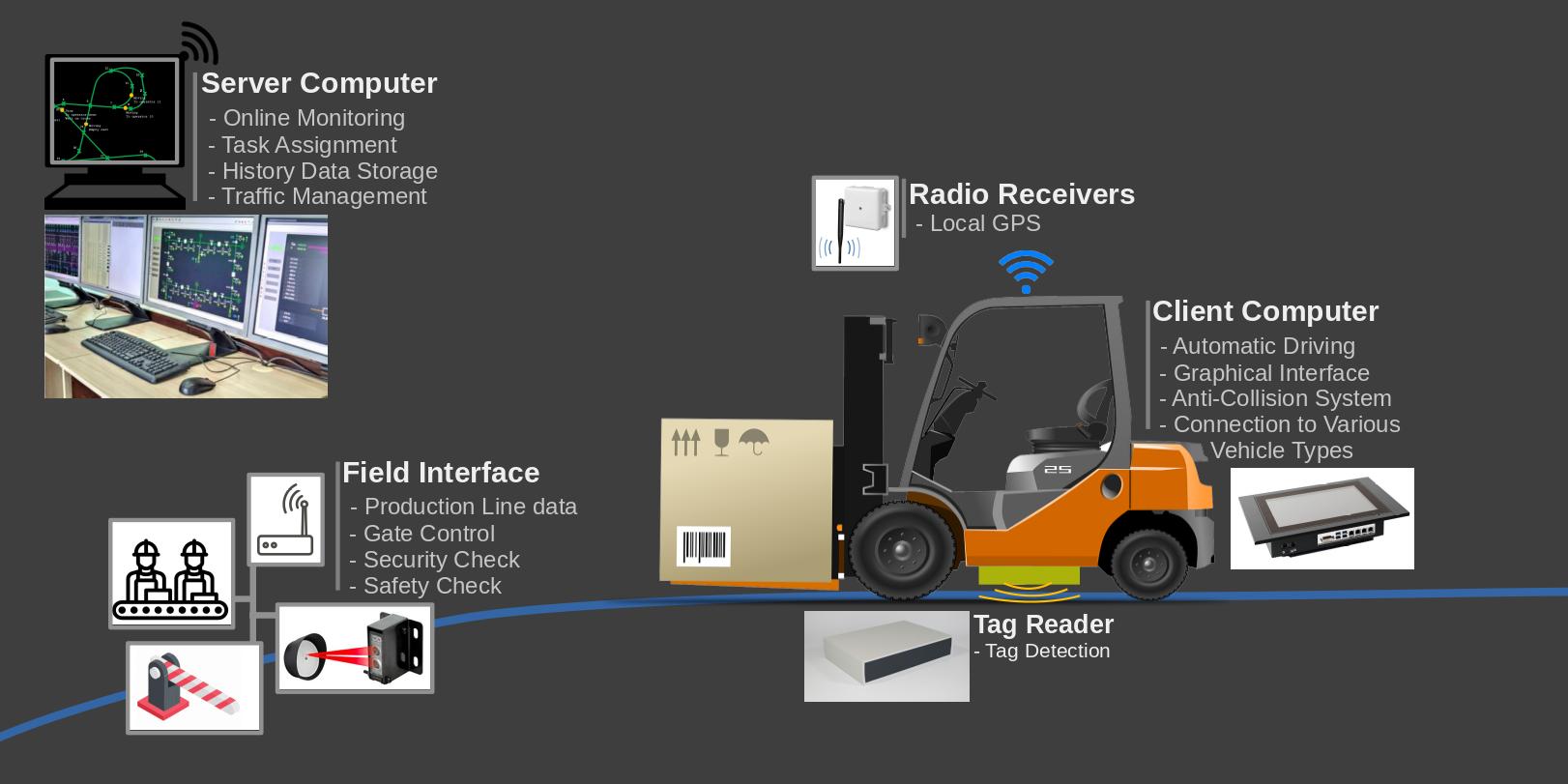
AgWay uses a Learning Method to drive vehicles,
– Install AgWay Client computer on your vehicle plus Radio-References in the plant (We can do it for you as well).
– Switch your vehicle to Learn-Mode, and manually drive it from point A to B.
– Repeat in the Learn-Mode from point B to C, C to D etc.
– Switch back your vehicle to Auto-Mode, AgWay Client computer automatically gets connected to AgWay Server computer and receives missions from it.
– Watch your vehicle automatically transferring the pallets from one point to another! The Client computer drives the vehicle, controlling steering & speed, traffic etc.; like the driver!
For more information about our Learning Method, you can refer to predefined_path_navigation_algorithm.
User Interface
The user interface on the Client computer allows technicians to set the required behaviors for vehicles. Complex calculation is done underneath by the Client application; letting the technicians to just concentrate on logistic levels of settings. It is possible to directly control all the vehicle actuators, or as an alternative, just share navigation data to vehicle controller and let the vehicle systems do the rest.
Plugins
If you know software development, you can also develop plugins for the Client application. This adds specific control capabilities to your vehicle components, like horn, lamps, hooks, etc. We can also do it for you based on your requested behaviors.
The same is applied to the Server computer in control room. Specific operations can be set using the plugins on the server side, like receiving/sending missions and feedback to Warehouse database or opening/closing doors with specific authorization check.
Supported Protocols
The main protocols for AgWay framework is CANbus and Modbus-TCP, which are used by many vehicle producers and also automation system producers. The specific definition of the protocols can be implemented using plugins. We can develop it for your vehicle or you can do it yourself.
Safe-Stop Controller
This is a feature on Client computer. It is a Minimum-Effort controller for optimal steering actuation. The most significant role of the controller is safe driving. The controller ensures safe and smooth driving with required accuracy or stopping the vehicle completely when required. Using the Safe-Stop Controller, the vehicle will not experience any inaccurate/dangerous driving.
We offer a Safety Kit for outdoors which are integrated to our Safe-Stop Controller. This makes the whole system resistant to any weather condition and light intensity.
Environment
AgWay can drive vehicles both indoors and outdoors. This is a unique feature among other navigation platforms. It works in -25 to +50’C, up to 99% relative humidity, 10m fog visibility, 8mm/h rainfall and 150m snow visibility.
Floor Slop/Unevenness